노스캐롤라이나 주립대학교의 연구진이 애벌레와 같은 방식으로 움직일 수 있는 소프트 로봇을 개발했다고 밝혔습니다. 이 로봇 좁은 공간에서 전진, 후진 및 움츠러드는 동작이 가능합니다. 사용자는 열을 이용하여 로봇을 다양한 방향으로 조종할 수 있습니다.
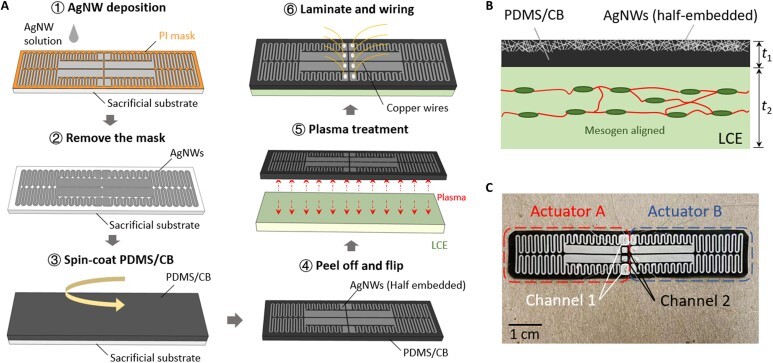
이 소프트 로봇은 열에 노출될 때 축소 및 팽창하는 두 개의 폴리머 층으로 구성됩니다. 게다가 팽창하는 폴리머 층에는 전기 전류를 지원하기 위해 은 나노와이어가 내장되어 있습니다. 이로써 전류로 생성된 열을 통해 로봇을 제어할 수 있게 됩니다.
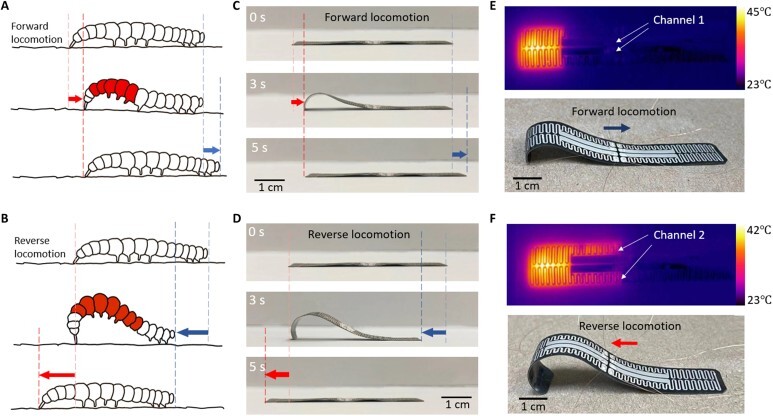
노스캐롤라이나 주립대학교의 기계 및 항공우주공학 교수인 Yong Zhu는 "캐터피러의 움직임은 몸의 지역 곡률에 의해 제어됩니다. 로봇이 앞으로 움직일 때와 뒤로 움직일 때 몸이 다르게 구부러집니다." 라고 보도 자료에서 밝혔습니다. "우리는 지네의 생체 역학에서 영감을 받아 그 지역적 곡률을 모방하여, 나노와이어 히터를 사용해 지네와 유사한 곡률과 움직임을 제어했습니다. 소프트 로봇에서 두 가지 방향으로 움직이는 것은 상당한 어려움을 겪는데, 이 나노와이어 히터를 내장함으로써 로봇의 움직임을 두 가지 방법으로 제어할 수 있게 되었습니다. 우리는 소프트 로봇의 가열 패턴을 조절함으로써 로봇의 어느 부분이 구부러지는지 제어할 수 있습니다. 그리고 가해지는 열의 양을 조절함으로써 그 부분이 어느 정도 구부러지는지도 제어할 수 있습니다. 이 방법을 사용하면 소프트 로봇의 운동 방식이 매우 효율적이며, 더욱 더 효율적으로 만들 수 있는 방법을 탐구하는 것이 우리의 관심사입니다,”라고 Zhu 교수는 보도 자료에서 밝혔습니다.

이 연구 논문의 제1저자이자 노스캐롤라이나 주립대학교 박사후 연구원 Shuang Wu는 "일반적으로 우리가 적용하는 전류가 많을수록, 로봇이 양방향으로 더 빠르게 움직입니다. 그러나, 우리는 폴리머가 냉각될 시간을 주는 최적의 사이클이 있다는 것을 발견했습니다. 즉, '근육'이 다시 수축하기 전에 효과적으로 이완될 수 있습니다. 만약 우리가 애벌레-봇을 너무 빨리 사이클링하려고 한다면, 몸은 다시 수축하기 전에 쉴 시간이 없었고, 이것은 애벌레-봇의 움직임을 손상시켰습니다." 라고 밝혔습니다.

이번 연구는 오픈 액세스 저널인 Science Advances에 게재되었습니다. 이 방법을 활용한 다양한 응용 분야, 예를 들어 탐색 및 구조용 장치 등과의 통합도 고려될 것으로 보입니다.
'과학 뉴스 > 로봇,AI 뉴스' 카테고리의 다른 글
| 세계 최고 AI학회에서 교육분야 최초로 논문 채택! 국내기업 '뤼이드'의 이미지 시각화 기술 (0) | 2023.04.07 |
|---|---|
| 50개 언어를 구사하는 AI교수, 실제 강의를 진행한다? (0) | 2023.04.06 |
| ChatGPT, 의사 국가시험까지 정복? 한의사 국가시험에서 합격선에 근접한 ChatGPT-4! (0) | 2023.04.05 |
| ChatGPT활용한 로봇 등장? AI 로봇 'GPT-플래티' 상용화 예정 (0) | 2023.03.31 |
| 대한민국 육군, 순찰 및 불침번에 자율주행로봇 사용한다? (0) | 2023.03.30 |




댓글